By Dan Rubinstein
Photos by Terence Ho
The construction industry is notoriously resistant to change. Projects can be extremely complex, with architects, engineers, builders and subcontractors guided by different, sometimes competing priorities. They’re also typically risk-averse — or, to be blunt, set in their ways.
New modes of collaboration and new technologies are the key to modernizing how we build. This is an urgent need in Canada, considering the country’s severe housing shortage, the importance of adopting more sustainable processes and materials, and an impending wave of retirements that will see about 20 per cent of the sector’s workforce hang up their hammers by the end of the decade.
Enter Thelma and Louise.

Members of the 2025 CSALT team pose with “Louise” the collaborative robot. From left to right: Kristine Prochnau, Sam Lane-Smith, Adonis Lau, Mikhala Gibson, Catalin Bacalu, Prof. Sheryl Boyle, Oscar Werlich.
Named after the protagonists of the eponymous early 1990s feminist road-trip film, the pair of collaborative robots are part of the Carleton Sensory Architecture and Liminal Technologies Laboratory‘s effort to belatedly bring construction into the 21st century.
“We’re still in the early stages of this transition,” says CSALT director Sheryl Boyle, who has been an architecture professor at Carleton for 20 years.
“The acceptance of new technologies in construction is fairly low. But there are many ways we can help advance the industry and make it more efficient.”
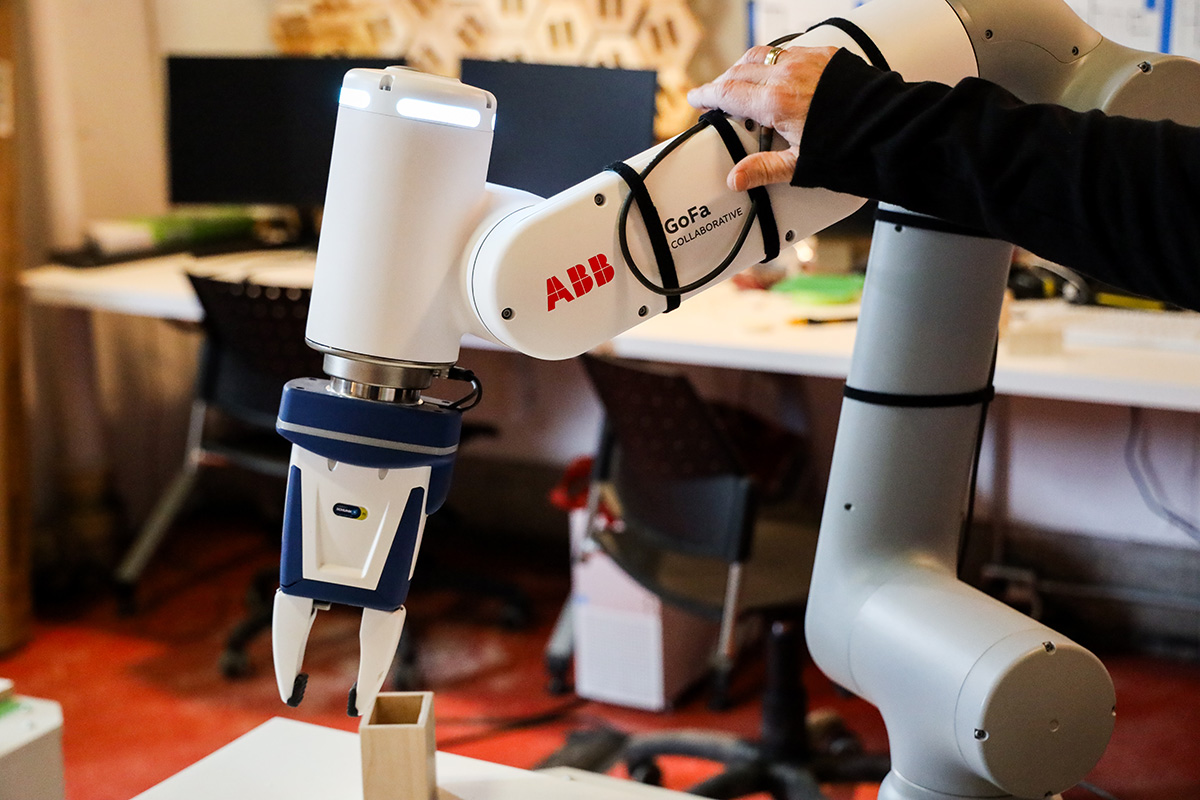
Provided through a partnership with ABB Robotics Canada, the lab’s “cobots” are essentially miniaturized versions of the robotic arms deployed on automotive assembly lines.
Thanks to force sensors that make the Thelma and Louise stop when they bump into something, and smooth plastic armature with no pinch points, the machines can be operated by students without the need for additional safety fences.
This makes them perfect tools for experimentation — and opens the door to a world of possibilities.
Expanding the Workforce
Working outdoors in inclement weather is one of the challenges faced by builders in Canada. Hands, feet and faces get cold, and a lot of jobs are limited to young, strong able-bodied people.
But if parts of a new home could be prefabricated using robots in an indoor facility and then installed on site, the work could be done by anybody who is properly trained, and the assembly time would be compressed.
“You don’t need to be a computer engineer to manipulate the robot,” says Sam Lane-Smith, a CSALT master’s student who is exploring ways to incorporate more modular, prefabricated construction (such as kitchen and bathroom pods and panelized walls and floor assemblies) into multi-unit buildings.
“We’re seeing progress toward this type of accessibility, which would help expand the workforce. You don’t need to be in peak physical shape because the robot basically serves as an extra appendage.”

Master’s student Adonis Lau.
Fellow master’s student Adonis Lau is focused on writing code for Thelma and Louise. He spent some time last year at ETH Zurich, a Swiss university that’s home to the world’s largest and most advanced construction robotics research lab.
Lau wrote a program that the Carleton cobots used to stack a set of wooden blocks and successfully scaled up that code for the much larger machines in Zurich.
“A digital model assumes that each block is the exactly the same size,” he explains, “but in real life, there’s usually some deviation in construction materials. We developed a script that places a block in position, then measures it, then places and measures the next block, so you can make adjustments in real time.”
This research can be applied to retrofit projects, for example, because buildings get deformed over the years. If you want to reclad a structure with new exterior panels, the building could be digitally scanned and a robot could make a collection of customized panels that fit seamlessly.

Safe and Fast Iteration
To Boyle, these robots and the 2025 CSALT team — which includes PhD students Kristine Prochnau, Sharmeen Dafedar, master’s students Sam Lane-Smith, Adonis Lau, Catalin Bacalu and Mikhala Gibson and undergrads Oscar Werlich, Oshan Tan, Najah Islam, Vivan Ma, Salma Ibrahim, Gail Cardoza and Blanche Baylosis — represent the future of construction.
Small cobots could be used to quickly and safely make prototypes and iterate in architecture offices, evaluating how building components come together. This would be a step toward larger-scale testing in fabrication facilities and, ultimately, production.
“The thing I dislike most about contemporary construction processes, coming from a family of tradespeople, is that traditionally, an architect designs something and then throws it to an engineer, who takes the blueprint and doesn’t talk to the architect anymore,” says Prochnau.
“Then the engineer passes it onto a contractor, and they don’t talk to one another. There’s a much better way to integrate these processes.”
“It’s really about optimization,” adds Bacalu. “And to help us push in that direction, Sheryl is the perfect enabler. She helps us make the connections with the right people. She asks us what we want to do and then finds the support and resources we need.”
Friday, April 4, 2025 in Architecture, Faculty of Engineering and Design, Innovation
Share: Twitter, Facebook



